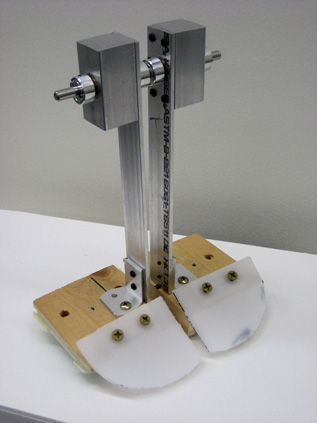
A "passive walker" is a simple mechanical oscillator than can be made to walk down a slight incline using only gravity for power. This passive walker is a test design for a future "passive-dynamic" robotic walker, one that will use small motors to replace the generating force of gravity, allowing it to travel continuously on a flat surface.
|
 |

