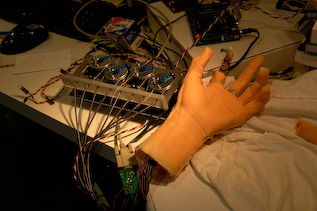
This prototype robotic hand features two degrees-of-freedom (DOF) per digit, and is powered by a bank of servos through a pull-pull cable operating system.
The finger joints are custom designed and cast in urethane rubber. The skeletal structure is thermoplastic bonded to aluminum, and the skin is a platinum-cure silicone. Each finger also has two pressure sensors for feedback and control.
|