This is a pattern classification network, or multi-layer "perceptron". What makes it interesting is that it uses a contrastive-Hebbian learning scheme, so there are no credit-assignment problems or back-propagation calculations.
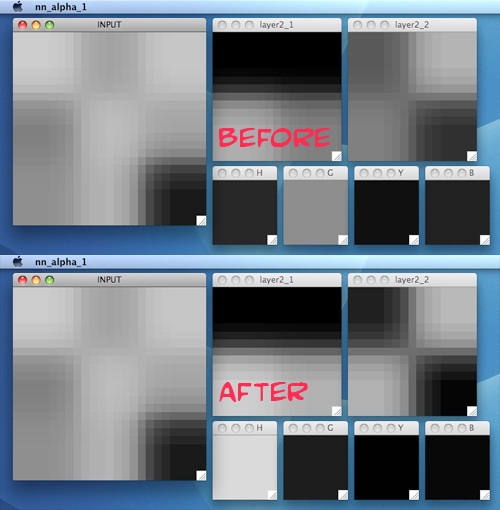
In the "before" visualization, the network is un-trained and presented with a random looking input. The desired output is "H", so the output is clamped during a brief learning period. The weights are adjusted according to a fixed-threshold BCM rule.
After learning, the ouput matches the teaching signal.
Again, this is an Xcode project using OpenCV. Check back for the code, or email me: brian90254 at gmail dawt com. |