SPECIFICATIONS:
COMPUTER: Apple MacMini, 2.66GHz Intel Core 2 Duo.
MOTORS: Dual Johnson 24V with planetary gearhead.
GEARBOX: Machine Lab right-angle gears w/ encoders.
BATTERIES: BattlePack NiMH 4200mAHr 24V.
CONTROLLER: Dual Space-Eight 100A.
TELEMETRY: MaxStream Spread-Spectrum Serial.
TETHERED: Custom Play Station-to-CAN interface.
NETWORK: CAN protocol w/ custom CAN-Serial adaptor.
SENSORS: Sharp IR array, GPS, compass, iSight camera.
COMPUTER VISION: OpenCV based histogram filtering.
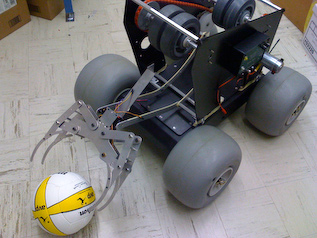
This robot is based on an MMP-40 platform, designed and built by The Machine Lab, Fort Collins, CO.
The Machine Lab (TML) specializes in customized robotic platforms for research and military applications.
|